«هيكتور» روبوت للاستخدامات الأرضية والفضائية
«هيكتور» يتّبع آليات مماثلة للعضلات في النظم البيولوجية
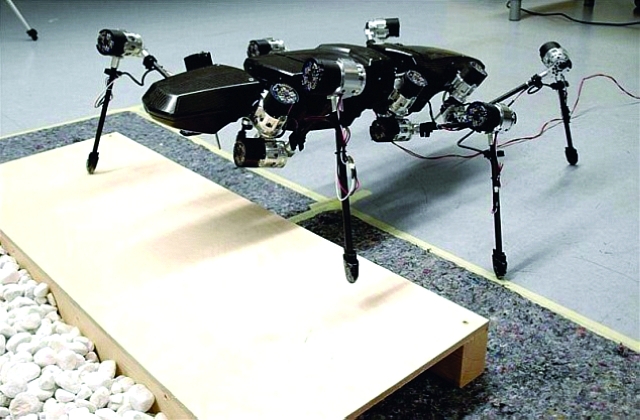
ابتكر باحثون ألمان روبوتاً آلياً يتخذ من فئة الشبحيات أو العصويات في الحشرات مصدراً لاستلهام شكله وخواصه، وتحديداً رتبة تعرف بالحشرات العصوية. ويتسم الاختراع الجديد بقدرته على المشي وصعود درجات السلم، وقد أبصر النور بعد سلسلة من الأبحاث التي استهدفت كيفية تحريك الحشرات العصوية لسيقانها.
ومحاولةً لنسخ ومحاكاة مخلوقات الطبيعة من تلك الحشرات، منح الخبراء في جامعة بيليفيلد الألمانية الروبوت الحديث «هيكتور» ست أرجل، أي ما مجموعه 18 مفصلاً مرناً للغاية، من منطلق تهيئة الابتكار للمشي على الأسطح غير المستوية.
ويذكر أنه قد تم تطوير الروبوت العصوي ليكون قادراً على نقل ما يفوق ثلاثة أضعاف وزنه. وبهيكل مصنوع من ألياف الكربون والبلاستيك، ويزن الروبوت حوالي 12 كيلوجراماً فحسب، وبالتالي فإن الحمولة التي يمكنه حملها تقدر بنحو 30 كيلوجراما.
سيقان آلية
ومن جهة السيقان الآلية، فإنه قد تم تزويدها بمجسات لمساعدة الروبوت في الحصول على ردود فعل جيدة تجاه الأسطح، وتمكينه من تسلق الأشياء التي تعترض طريقه، كالدرج. وبشكل مستقل، يتم التحكم بالسيقان للحفاظ على استقرار وثبات الروبوت، فضلاً عن تزويد كل مفصل في الساق بخواص تمكن الروبوت الحشري «هيكتور» من محاكاة سلوك الحشرات العصوية، والتكيف مع الأراضي الوعرة. وذكرت صحيفة «ديلي ميل» البريطانية أن الباحثين خلف ذلك الابتكار يعتقدون أنه بإمكانهم توظيف وليدهم التقني في تطوير أنواع جديدة من مركبات البحث والإنقاذ المستقلة.
سبر الكواكب
كما يمكن أن تستثمر التقنية في إيجاد فوج من الروبوتات لحمل ونقل البضائع في الأراضي، أو حتى مساعدة العلماء في استكشاف وسبر الكواكب الأخرى. وقال البروفيسور أليكس شنايدر، رئيس هندسة الميكاترونيكس الحيوية في الجامعة إن الأسلوب المرن في محركات «هيكتور» مماثل للطريقة التي تعمل بها العضلات في النظم البيولوجية. ومع ذلك، فإن المرونة وحدها لا تكفي ليكون الروبوت قادراً على المشي في البيئات الطبيعية المليئة بالعثرات والعقبات.
لذلك تمثل التحدي في تطوير نظام للتحكم من شأنه تنسيق حركات السيقان لدى «هيكتور» في البيئات الوعرة.
نموذج أولي
يتم التحكم في الروبوت، عبر خوارزميات مستوحاة من الناحية البيولوجية لأسلوب حركة الحشرات العصوية، كما أنه مصمم للاستفادة من تجاربه. وحالياً، أقدم الباحثون على بناء نموذج أولي قادر على استشعار محيطه بصورة تفصيلية، وذلك بمساعدة كاميرات ومجسات للمس.