أسماك روبوتية بحاسة استشعار
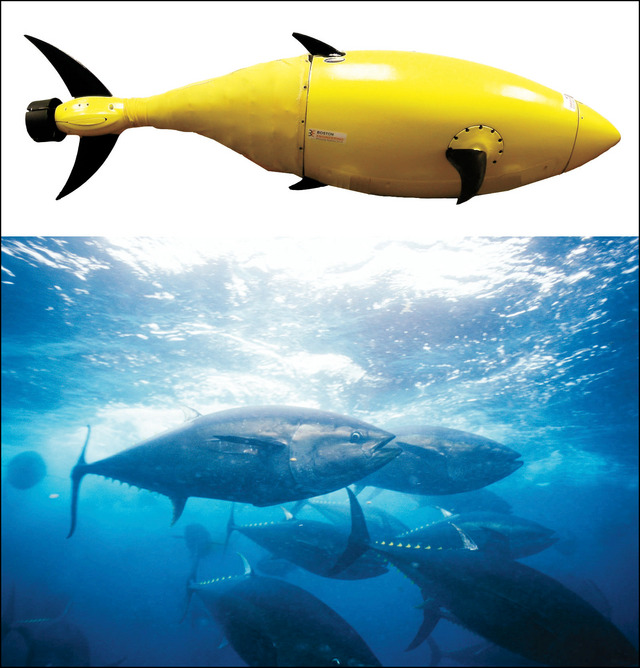
طور باحثو مشروع "قدرة الأسماك الروبوتية على التنقل والاستشعار"، الذي يعرف اختصارا بـ"فيلوس"، روبوتات تتمتع بحاسة جديدة، وهي حاسة الاستشعار بواسطة جهاز الخط الجانبي. وفي حين أن جميع الأسماك تملك جهاز الاستشعار هذا، فإنه لم يسبق إدخال نسخة تقنية منه إلى المركبات تحت المائية المصنوعة من قبل البشر.
وتقول مجلة "ساينس ديلي" العلمية، في تقرير نشرته أخيرا، إن باحثي المشروع، الممول من قبل الاتحاد الأوروبي، عملوا خلال السنوات الـ 4 الماضية، على دراسة قدرة الأسماك على الاستشعار والتنقل باستخدام جهاز الخط الجانبي، وذلك بهدف فهم الكيفية التي ترصد بها الأسماك سمات التدفق وتستغلها، وتطوير روبوتات تحت مائية فعالة استنادا إلى مبادئ بيولوجية.
وعلى الرغم من أن التدفق يمثل حالة شديدة التقلب وغير مستقرة من حالات المادة، فإن يمكن قياسه وتوصيفه اعتمادا على العديد من السمات البارزة التي لا تتغير كثيرا في المكان والزمان (مثل اتجاه التدفق أو شدة الاضطراب). ويمكن وصف هذه السمات البارزة بعد ذلك بـ"المشهد التدفقي"، وهو المشهد الذي يساعد الأسماك والروبوتات على توجيه نفسها، والتنقل، والتحكم بتحركاتها.
ويقول البروفيسور مارجا كروسما، وهو المنسق العلمي لمشروع "فيلوس": "في مجال الروبوتات، يعامل التدفق حتى هذه اللحظة على أنه اضطراب يدفع الروبوتات بعيدا عن مسارها المحدد." ويضيف: "لقد أظهرنا أن التدفق يمثل أيضا مصدرا للمعلومات يمكن استغلاله لتحسين مراقبة المركبات تحت المائية. وعلاوة على ذلك، فإنه يمكن للتدفق أن يشكل مصدرا للطاقة إذا ما تمكنا من فهم دينامياته، والتفاعل مع الدوامات والتيارات بطريقة ذكية".
وأظهرت تجارب استشعار التدفق التي أجريت في إطار مشروع "فيلوس" أن الأسماك الروبوتية تستطيع توفير طاقتها من خلال إيجاد مناطق موفرة للطاقة في التدفق تتسم تياراتها بالضعف أو من خلال التفاعل مع الدوامات بحيث تساهم في دفعها إلى الأمام. وتستطيع الأسماك الروبوتية أيضا تحديد اتجاه التدفق والسباحة ضد التيار أو الرسو في التدفق في ظل مقاومة الانجراف مع التيار من خلال قياس سرعة التدفق. وثبت أن سباحة الأسماك الروبوتية وراء جسم ما داخل التدفق تقلل من استهلاك الطاقة. ويوضح البروفيسور كروسما قائلا: "يشبه ذلك تقليل ما تبذله من جهد من خلال الجلوس وراء سائق دراجة آخر أو تقليل ما تستهلكه سيارتك من وقود من خلال القيادة وراء شاحنة."
وطور باحثو مشروع "فيلوس" عدة نماذج أولية لأجهزة خط جانبي اصطناعية ومحركات روبوتية من أجل اختبار مختلف جوانب القدرة على الاستشعار والحركة في السوائل، بما في ذلك كيفية استخدام مواد متوافقة للسباحة بشكل فعال خلال الاضطرابات، وكيفية بناء روبوتات بسيطة ميكانيكيا وتتصرف، مع ذلك، كالأسماك، وكيفية تفسير سمات التدفق واستخدامها للتحكم في المركبات، وكيفية قياس حركة الروبوتات نفسها من إشارات التدفق.
ويقول الباحثون إن مشروع "فيلوس" ساعدهم على فهم النظرة "السمكية" للبيئة المائية. ويضيف البروفيسور وليام ميغيل، الذي قاد مساهمة جامعة "باث" البريطانية في المشروع: "لقد ساعدتنا التجارب الروبوتية أيضا على فهم سلوك الأسماك." ويتابع: "من خلال تسجيل بيانات استشعار التدفق المجموعة بواسطة رأس سمكة روبوتية قمنا ببرمجتها لتتحرك كسمكة حقيقية في ظروف تدفق مماثلة، فإننا نستطيع فهم ما تملك الأسماك قدرة على إدراكه."
وطُورت الأسماك الروبوتية القادرة على الاستشعار باستخدام جهاز الخط الجانبي في إطار جهد شارك فيه خبراء في بيولوجيا الأسماك (من جامعة "باث" في بريطانيا)، وفي الروبوتات تحت المائية (من جامعة "تالين" للتكنولوجيا في إستونيا)، وفي الهندسة الميكانيكية (من جامعة "ريغا" التقنية في لاتفيا)، وفي تحليل الإشارات وفهم تدفق (من جامعة "فيرونا" في إيطاليا) وفي تكنولوجيا الاستشعار (من المعهد الإيطالي للتكنولوجيا).